The Challenge
Canopy leaf area tells you how a vine is doing, but measuring it by hand doesn't scale past a few plants. I wanted per-vine measurements across whole vineyard blocks.
The Solution
A ground robot that drives vineyard rows capturing hemispherical photos, positioned by RTK GPS — u-blox ZED-F9P modules on rover and base station with corrections over a 433 MHz link — so every measurement is tagged to a location accurate to the centimeter.
What I Built
RTK Positioning
ZED-F9P on rover and base station, corrections over 433 MHz, referenced to a precise-point-positioning base.
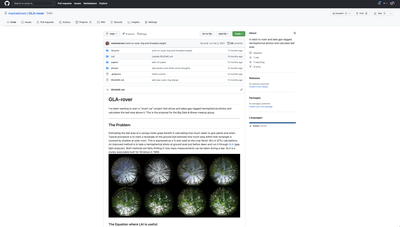
Hemispherical Photography
High-resolution canopy captures from multiple angles as the rover drives the row.
GPS-Tagged Leaf Area
Sub-centimeter positioning means each leaf-area calculation belongs to a specific vine.
Outcome
- Sub-centimeter positioning, in the field
- Leaf area per vine instead of per block
Built With